Introduction
Cet article présente une implémentation Arduino permettant de contrôler un moteur à l’aide du pilote BTS7960. Le programme gère la mise en marche, l’arrêt, la variation progressive de vitesse et le changement de direction du moteur. Il intègre également la mesure de la puissance électrique consommée en utilisant un capteur de courant ACS712 et un capteur de tension.
Le BTS7960 est un pilote de moteur haute puissance largement utilisé dans les applications de robotique et d’automatisation. Il est conçu pour commander des moteurs à courant continu (DC) et offre une gestion efficace du courant et de la protection thermique. En mars 2025, on le trouve pour une dizaine d’euros.
Le module BTS7960

Caractéristiques principales
Le BTS7960 est un pont en H conçu pour piloter des moteurs nécessitant un courant élevé. Voici ses principales caractéristiques :
- Tension de fonctionnement : 5,5V à 27V
- Courant maximal : 43A
- Protection thermique et contre les surintensités
- Compatible avec les microcontrôleurs 3,3V et 5V (ESP32, Arduino, Raspberry Pi, etc.)
- Commande par signal PWM jusqu’à 25 kHz
- Faible résistance interne (~16 mΩ) pour une meilleure efficacité
Schéma de connexion
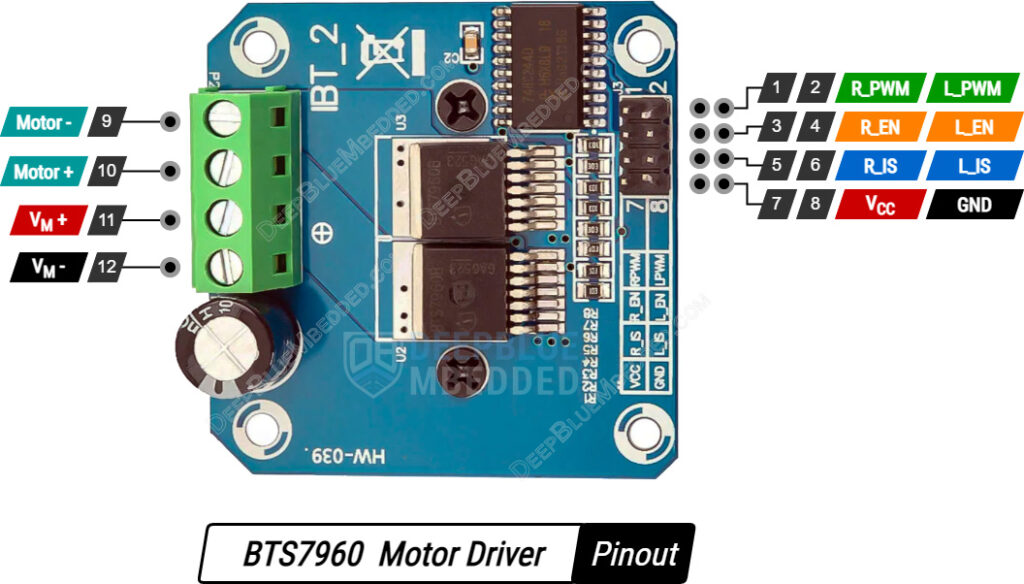
Le module BTS7960 est souvent disponible sous la forme d’une carte avec des connecteurs facilitant son usage. Voici les broches les plus importantes :
- VCC : Alimentation logique (5V)
- GND : Masse
- RPWM : Signal PWM pour la rotation dans un sens
- LPWM : Signal PWM pour la rotation dans l’autre sens
- REN : Activation de la commande RPWM
- LEN : Activation de la commande LPWM
- IS : Sortie de détection de courant (facultatif)
Un exemple de connexion avec un Arduino :
Arduino | BTS7960
-------------------
5V | VCC
GND | GND
9 | RPWM
10 | LPWM
8 | REN
7 | LEN
Fonctionnement
Le BTS7960 fonctionne en utilisant deux signaux PWM et deux broches d’activation.
- Pour avancer : Activer LEN et envoyer un signal PWM sur LPWM
- Pour reculer : Activer REN et envoyer un signal PWM sur RPWM
- Pour arrêter : Désactiver LEN et REN
Un exemple de code avec Arduino :
Avantages et inconvénients
Avantages :
✅ Haute capacité en courant (43A) ✅ Protection thermique et contre les surintensités ✅ Compatible avec Arduino, ESP32 et Raspberry Pi ✅ Utilisation simple avec deux signaux PWM
Inconvénients :
❌ Nécessite un bon refroidissement pour les courants élevés ❌ Plus encombrant qu’un simple L298N ❌ Commande plus complexe qu’un pont en H basique
Le module ACS712 20A
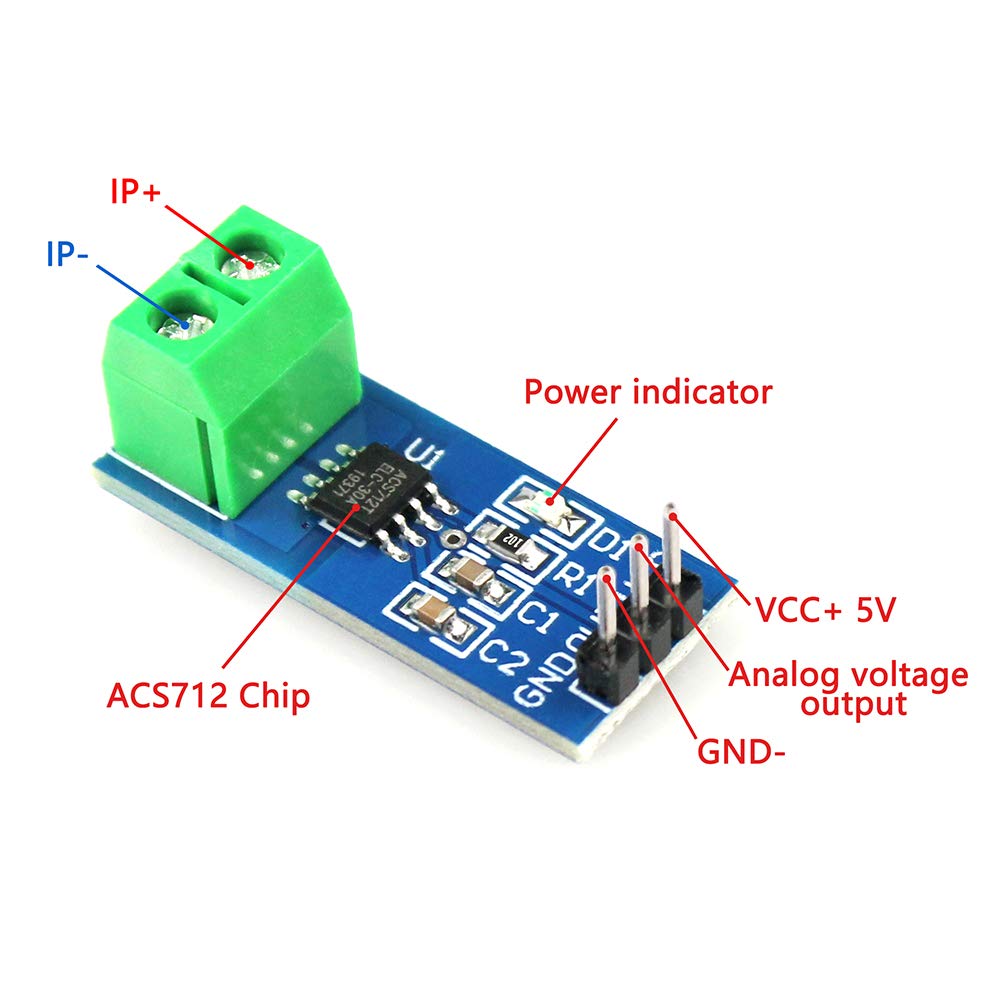
Le capteur de courant ACS712 20A est un capteur très populaire pour mesurer le courant électrique en toute sécurité dans divers projets électroniques et électriques. Il est utilisé aussi bien par les amateurs que par les professionnels grâce à sa simplicité d’utilisation et sa précision. Cet article explore en détail le fonctionnement, les caractéristiques techniques, le câblage et l’utilisation de ce capteur avec un microcontrôleur comme l’Arduino.
1. Présentation du Capteur ACS712 20A
L’ACS712 est un capteur de courant basé sur l’effet Hall, fabriqué par Allegro Microsystems. Il permet de mesurer des courants alternatifs (AC) et continus (DC) tout en offrant une isolation galvanique entre la charge et la sortie du capteur.
Le modèle ACS712 20A est conçu pour mesurer des courants allant jusqu’à ±20A. Il fait partie d’une gamme de capteurs comprenant aussi des modèles pour 5A et 30A.
Applications courantes :
- Surveillance de la consommation électrique
- Systèmes de gestion de l’énergie
- Protection et diagnostic des circuits électriques
- Mesure de courant dans des moteurs et des alimentations
- Intégration dans des projets Arduino et Raspberry Pi
2. Caractéristiques Techniques
Voici les spécifications principales de l’ACS712 20A :
| Propriété | Valeur |
|---|---|
| Modèle | ACS712ELCTR-20A-T |
| Plage de mesure | -20A à +20A |
| Sensibilité | 100 mV/A |
| Tension d’alimentation | 5V |
| Consommation | 10 mA |
| Isolation galvanique | Oui |
| Sortie | Signal analogique |
| Temps de réponse | 5 µs |
| Précision | ±1,5 % |
| Température de fonctionnement | -40°C à 85°C |
3. Fonctionnement du Capteur
L’ACS712 utilise un circuit à effet Hall pour mesurer le champ magnétique généré par le courant qui traverse son circuit intégré. Ce champ est converti en tension proportionnelle à l’intensité du courant.
La tension de sortie est centrée sur 2,5V pour un courant nul :
- Si le courant circule dans un sens, la tension de sortie augmente proportionnellement.
- Si le courant circule dans l’autre sens, la tension diminue proportionnellement.
Le capteur fournit une sensibilité de 100 mV/A, ce qui signifie que pour un courant de 10A, la tension de sortie sera : Vout=2.5V+(10A×0.1V/A)=3.5VV_{out} = 2.5V + (10A \times 0.1V/A) = 3.5V Et pour -10A : Vout=2.5V−(10A×0.1V/A)=1.5VV_{out} = 2.5V – (10A \times 0.1V/A) = 1.5V
4. Schéma de Câblage avec un Arduino
L’ACS712 se connecte facilement à un microcontrôleur tel qu’un Arduino. Voici le schéma de câblage typique :
Matériel nécessaire :
- 1x Arduino Uno
- 1x Capteur ACS712 20A
- 1x Résistance de charge
- Fils de connexion
Connexions :
| ACS712 | Arduino |
|---|---|
| VCC (5V) | 5V |
| GND | GND |
| OUT | A0 (entrée analogique) |
Le courant à mesurer doit passer par les bornes IP+ et IP- du capteur.
5. Code Arduino pour Lire le Courant
Voici un exemple de code pour mesurer le courant avec un Arduino :
Explication du Code
- Lecture de la valeur analogique provenant du capteur.
- Conversion en tension en utilisant la tension de référence (5V).
- Calcul du courant en soustrayant la tension au repos (2.5V) puis en divisant par la sensibilité (0.1V/A).
- Affichage des valeurs sur le moniteur série.
6. Précautions d’Utilisation
- Ne dépassez jamais les 20A, au risque d’endommager le capteur.
- Ajoutez un fusible en série avec le capteur pour protéger le circuit.
- Evitez les interférences électromagnétiques, car l’effet Hall est sensible aux champs magnétiques externes.
- Utilisez un filtre logiciel si la mesure est bruitée.
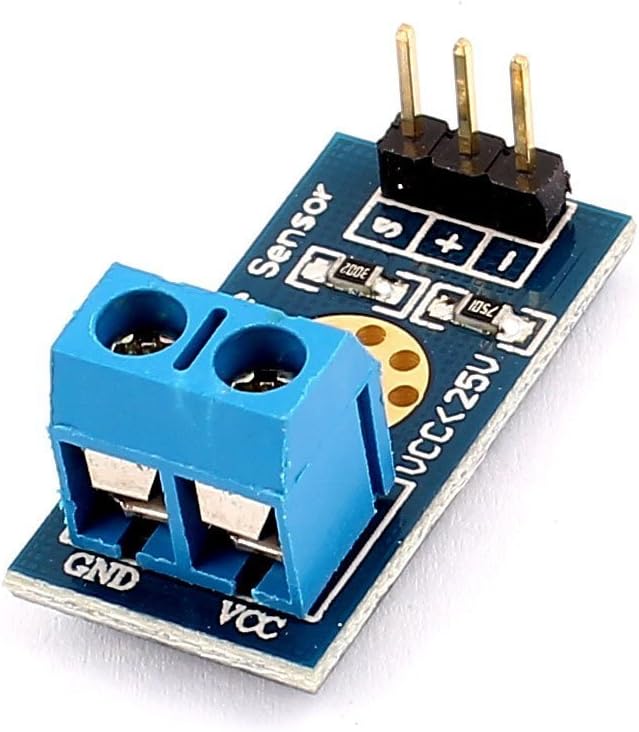
Diviseur de tension 25V
L’Arduino possède un convertisseur analogique-numérique (ADC) qui permet de mesurer une tension sur ses entrées analogiques. L’ADC de l’Arduino est généralement de 10 bits, ce qui signifie qu’il peut lire des valeurs comprises entre 0 et 1023, où 0 correspond à 0V et 1023 correspond à 5V (tension de référence).
Le code suivant montre comment lire la tension à partir de la broche analogique A0 (où la tension de 5V sera mesurée après la division) et la convertir pour obtenir la tension d’origine (25V).
Expérimentation
Matériel requis
- Carte Arduino (Uno, Mega, etc.)
- Module BTS7960 (pilote moteur haute puissance)
- Capteur de courant ACS712 20A
- Capteur de tension (pont diviseur ou module DCT Electronic)
- Moteur électrique 12V
- Alimentation adaptée
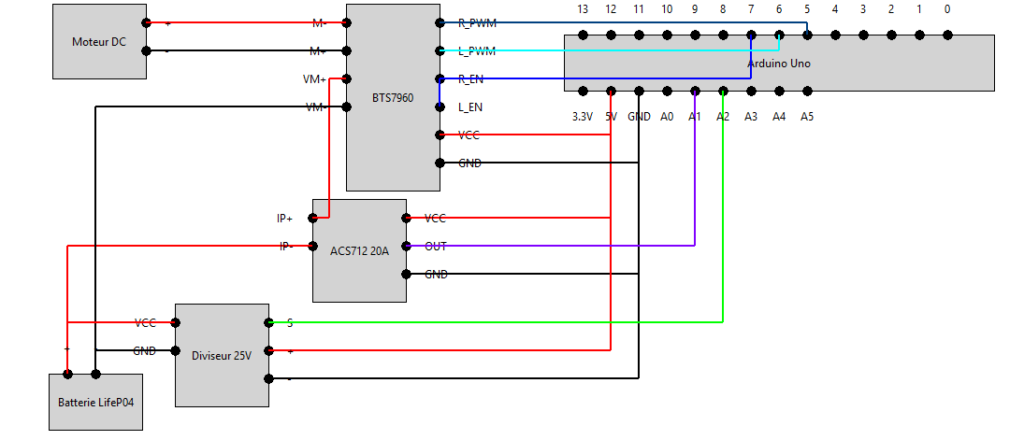
Définition des broches
Le BTS7960 utilise quatre broches pour le contrôle du moteur :
- RPWM_ PIN (5) : Signal PWM pour la rotation dans un sens
- LPWM_ PIN (6) : Signal PWM pour la rotation dans l’autre sens
- REN_ PIN (7) : Action du module
- LEN_ PIN (7) : Activation du module
- ACS712 20A PIN A1 : Mesure de l’ampérage
- Diviseur tension PIN A2 : Mesure de la tension
Schéma
Classe BTS7960 : Contrôle du moteur
Une classe BTS7960 est définie pour encapsuler les fonctionnalités du pilote moteur. Elle permet :
- L’initialisation des broches avec
begin() - L’arrêt du moteur avec
stop() - La gestion de la vitesse avec
setSpeed(int speed) - La modification de la direction avec
setDirection(bool dir) - L’arrêt d’urgence
emergencyStop() - Une augmentation ou réduction progressive de la vitesse avec
gradualSpeedChange(int targetSpeed, int step, int delayTime) - La récupération de l’état du moteur avec
getMotorState()
Mesure de la puissance électrique
Mesure de la tension
Une fonction mesurerTension(int brocheAnalogique) mesure la tension à l’aide d’un convertisseur analogique-numérique de l’Arduino.
Calibration du capteur de courant
La fonction calibrerOffset(int brocheAnalogique) mesure un offset initial du capteur ACS712 pour compenser les erreurs de mesure.
Mesure du courant
mesurerCourant(int brocheAnalogique) calcule le courant absorbé en utilisant la tension mesurée et la sensibilité du capteur.
Calcul de la puissance
La fonction puissance(String libelle) calcule la puissance instantanée P = V * I et affiche les valeurs mesurées.
Fonctionnement du programme
Le programme suit ces étapes :
- Initialisation du moniteur série et du pilote moteur.
- Mesure initiale de la puissance consommée (
START). - Calibration du capteur de courant (
CALIB). - Accélération progressive du moteur (
ACCEL). - Attente de 10 secondes en régime de croisière (
RUN). - Décélération progressive jusqu’à l’arrêt (
BRAKE). - Arrêt complet du moteur (
STOP).
Source
Conclusion
Ce projet permet de piloter un moteur à l’aide du BTS7960 tout en surveillant sa consommation électrique. Il peut être adapté à divers besoins en robotique et automatisation. Des améliorations possibles incluent l’ajout d’un système de communication pour transmettre les données en temps réel à une interface de contrôle.