Le moteur 28BYJ-48, associé au module de pilotage ULN2003, est l’un des plus utilisés dans les projets Arduino. Peu coûteux et facile à mettre en œuvre, il permet de réaliser des mouvements précis ou continus dans les deux sens de rotation.
Cet article présente une classe C++ complète permettant de contrôler ce moteur, ainsi qu’un gestionnaire pour simplifier la coordination de plusieurs moteurs dans un même projet.
Matériel nécessaire

- 1 moteur pas à pas 28BYJ-48
- 1 module de commande ULN2003
- 1 carte Arduino (Uno, Mega, Nano, etc.)
- Des câbles de connexion
Le moteur est généralement vendu avec son module ULN2003, qui comporte 4 entrées IN1 à IN4 reliées aux bobines du moteur, ainsi qu’un connecteur 5 fils spécifique.
Principe de fonctionnement
Un moteur pas à pas fonctionne grâce à une séquence d’activation de ses bobines. Dans le cas du 28BYJ-48, il possède quatre bobines qu’il faut exciter successivement selon une séquence de 8 pas.
La séquence utilisée est la suivante (chaque ligne indique l’état des quatre sorties) :
1,0,0,0
1,1,0,0
0,1,0,0
0,1,1,0
0,0,1,0
0,0,1,1
0,0,0,1
1,0,0,1
Cette logique d’activation permet une rotation fluide et contrôlée du moteur.
Organisation du programme
Le programme est composé de deux classes principales :
1. La classe Stepper28BYJ48
Elle représente un moteur unique et gère :
- La séquence des pas
- Le sens de rotation (horaire ou antihoraire)
- La vitesse, définie par un délai en millisecondes entre deux pas
- Le démarrage et l’arrêt du moteur
- La fonction release qui coupe l’alimentation des bobines pour économiser de l’énergie
Les principales méthodes sont :
- start(direction) : démarre le moteur dans le sens choisi
- stop() : arrête le moteur et coupe les bobines
- setSpeed(delayMs) : change la vitesse en ajustant le délai entre les pas
- update() : à appeler régulièrement dans la boucle loop() pour faire avancer le moteur
- release() : coupe toutes les bobines
- isMoving() : indique si le moteur est en mouvement
2. La classe StepperManager
C’est un gestionnaire capable de piloter plusieurs moteurs à la fois (jusqu’à 4 par défaut). Elle permet :
- D’ajouter un moteur
- De démarrer un moteur avec startMotor
- De l’arrêter avec stopMotor
- De modifier sa vitesse avec setMotorSpeed
- De mettre à jour tous les moteurs avec updateAll
- D’arrêter tous les moteurs avec stopAll
- De vérifier si au moins un moteur est en mouvement avec anyMoving
Cette structure est idéale si l’on veut synchroniser plusieurs moteurs sans complexité supplémentaire.
Exemple pratique
Dans l’exemple fourni :
- Le moteur est connecté aux broches 47, 49, 51 et 53 de l’Arduino Mega.
- Le moteur est ajouté au gestionnaire.
- Il est démarré en sens antihoraire avec une vitesse correspondant à un délai de 2 millisecondes par pas.
- La fonction updateAll() est appelée dans la boucle principale pour assurer la continuité du mouvement.
- Après 10 secondes de fonctionnement, le moteur est automatiquement arrêté.
Cette organisation permet aussi d’exécuter d’autres tâches dans la boucle principale sans bloquer le programme.
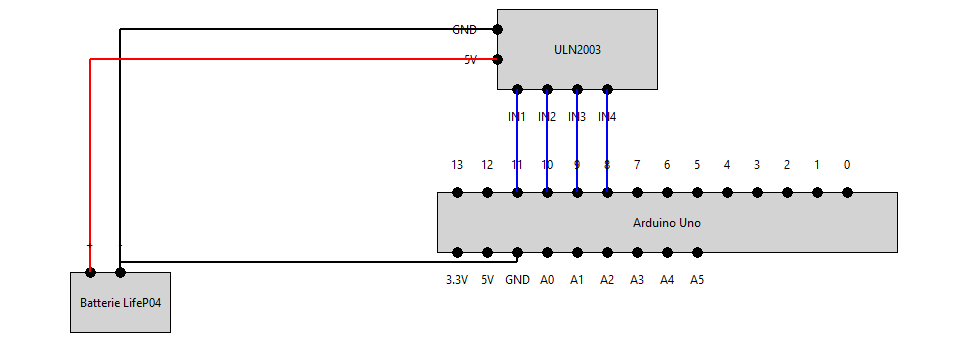
Schéma de principe
Par exemple, connecter les broches IN1 à IN4 aux broches 11 à 8 d’un Arduino Uno.
Relier le moins de l’alimentation à la masse de l’Arduino pour avoir une référence commune
Câblage
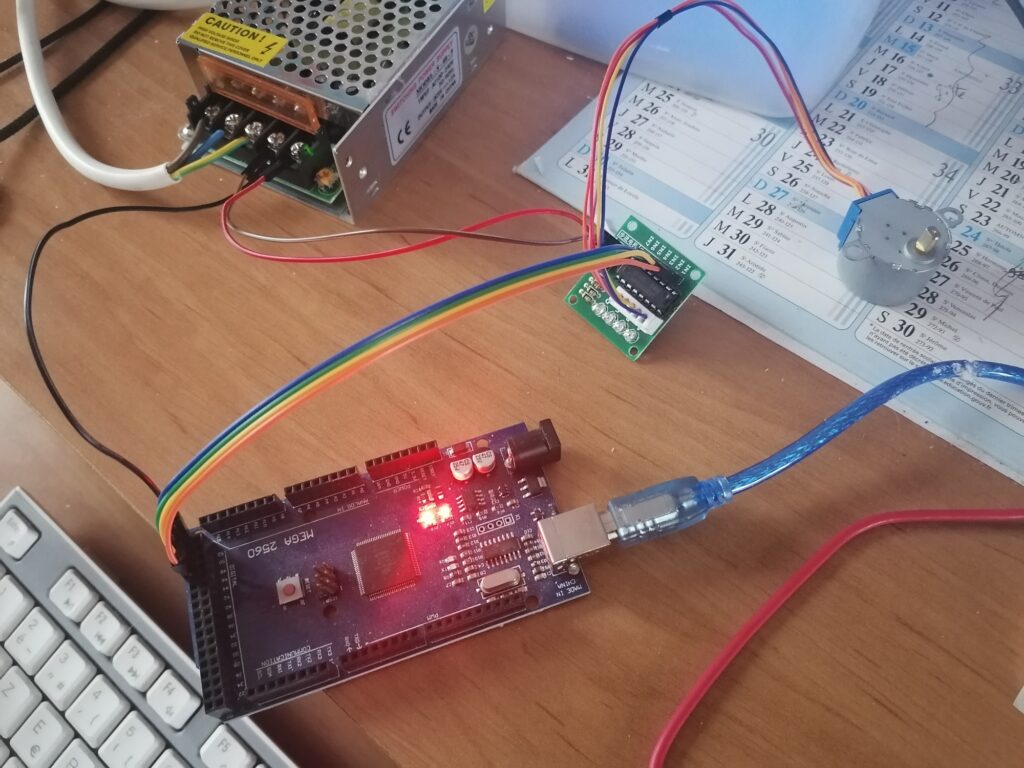
- Connecter les quatre broches IN1 à IN4 du module ULN2003 aux broches digitales de l’Arduino (dans l’exemple : 47, 49, 51 et 53 d’un Arduino Mega 2560).
- Relier l’alimentation 5V et la masse (GND) de l’ULN2003 à celles de l’Arduino.
- Brancher le moteur sur le connecteur 5 fils du module ULN2003.
Important : le moteur peut consommer jusqu’à 240 mA. Si plusieurs moteurs sont utilisés, il est conseillé d’avoir une alimentation externe 5V plutôt que de dépendre uniquement du régulateur intégré de l’Arduino.
Points forts de cette approche
- Modularité grâce à une classe par moteur
- Simplicité d’utilisation avec le gestionnaire multi-moteurs
- Souplesse puisque l’on peut changer le sens et la vitesse à la volée
- Économie d’énergie avec la fonction release() qui coupe les bobines à l’arrêt
Applications possibles
- Bras robotisés
- Plateformes rotatives
- Petits robots mobiles
- Positionnement précis d’une caméra ou d’un capteur
- Projets pédagogiques pour apprendre le pilotage des moteurs pas à pas
Source
Conclusion
Grâce à cette organisation orientée objet, le pilotage du moteur 28BYJ-48 devient simple, clair et extensible. Vous pouvez commencer avec un seul moteur puis en ajouter d’autres sans changer la logique générale.
Ce code constitue une excellente base pour vos projets Arduino nécessitant un ou plusieurs moteurs pas à pas légers.