1. Objectifs du Projet
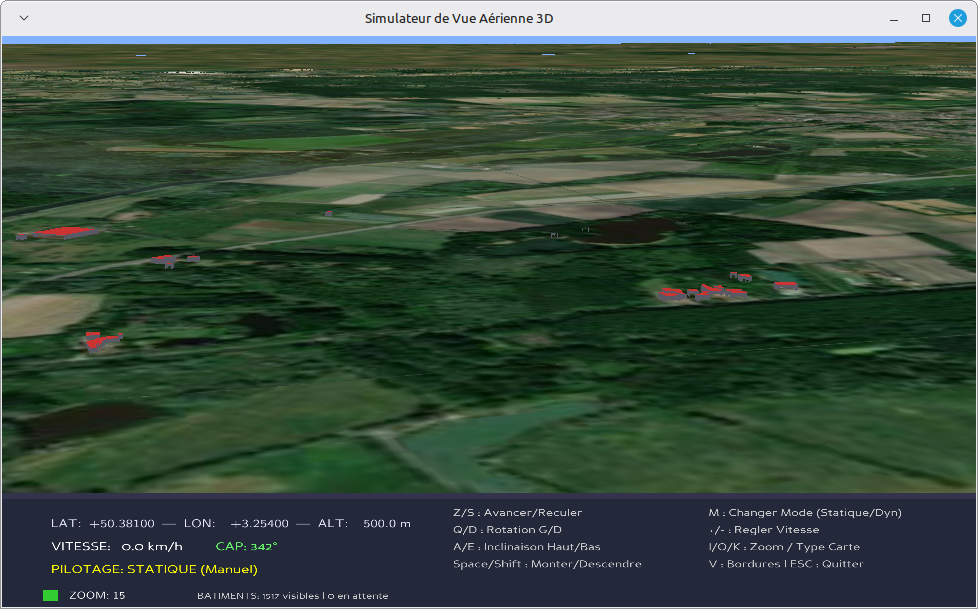
Le projet Helico est un simulateur de vol 3D développé avec le moteur Panda3D. Il vise à offrir une expérience d’exploration géographique immersive et performante.
Les principaux objectifs sont :
- Visualisation SIG Temps Réel : Afficher une représentation 3D de la Terre en utilisant des tuiles satellites ou cartographiques (OSM).
- Génération Procédurale de Bâtiments : Reconstruire l’environnement urbain en 3D à partir des données OpenStreetMap (API Overpass), téléchargées et générées à la volée selon la position de la caméra.
- Navigation Fluide : Proposer une interface de vol intuitive (type hélicoptère/drone) permettant de se déplacer librement sur de grandes distances.
- Performance : Utiliser le chargement asynchrone (multithreading) pour la gestion du terrain et des bâtiments afin de maintenir une fluidité d’affichage.
2. Dépendances et Environnement
Le projet repose sur Python 3.12 et utilise les bibliothèques suivantes :
Cœur du Système
- Panda3D : Moteur de rendu 3D, gestion du graphe de scène, des entrées et de la physique de base.
- NumPy : Manipulation efficace des matrices de données pour la génération de terrain (heightmaps).
- Requests : Gestion des requêtes HTTP pour le téléchargement des tuiles et l’interrogation de l’API Overpass.
Interface Utilisateur
- PyQt6 : Utilisé pour le lanceur (Launcher) permettant la configuration avant le démarrage du moteur 3D.
Autres
- Faulthandler : Aide au débogage des erreurs de bas niveau (segmentation faults).
L’environnement virtuel est situé dans le répertoire venv/.
3. Mode Opératoire
Lancement de l’Application
L’application peut être lancée de deux manières :
- Via le terminal :
bash source venv/bin/activate # Si nécessaire python main.py - Via le raccourci bureau : Utiliser le fichier
Helico.desktopsi disponible.
Configuration au Démarrage (Launcher)
Au lancement, une fenêtre de configuration permet de définir :
- Position de départ : Latitude, Longitude (en degrés décimaux) et Altitude (en mètres).
- Résolution : Largeur et hauteur de la fenêtre de rendu.
Commandes en Vol
| Touche | Action |
|---|---|
| Z / S | Avancer / Reculer |
| Q / D | Translation Gauche / Droite (Strafe) |
| A / E | Descendre / Monter (Altitude) |
| Souris | Orientation de la caméra (Yaw/Pitch) |
| V | Basculer l’affichage des arêtes des bâtiments (Mode fil de fer / plein) |
| K | Changer le type de carte (Satellite / OSM) |
| Echap | Quitter l’application. |
4. Architecture et Maintenance
La structure du projet est modulaire pour faciliter la maintenance et l’évolution.
Structure des Fichiers
main.py: Point d’entrée. InitialiseShowBase, la fenêtre, l’éclairage et instancie les gestionnaires principaux. Définit la boucle principale via les tâches Panda3D.src/: Code source du projet.engine/: Cœur de la simulation.scene.py: SceneManager. Gère le chargement tuilé du terrain (load_radius,zoom). Utilise unThreadPoolExecutorpour charger les textures et élévations sans bloquer le rendu.buildings.py: BuildingManager. Interroge l’API Overpass pour récupérer les empreintes de bâtiments. Génère les maillages 3D (GeomNode) procéduralement. Gère une queue de priorité pour l’apparition des bâtiments.camera.py: FlightCamera. Logique de déplacement de la caméra (lissage, vitesse variable selon l’altitude).terrain.py: TerrainGenerator. Crée le maillage du sol à partir des données d’élévation.
gis/: Outils géographiques.geo_utils.py: Conversion de coordonnées (Lat/Lon <-> Mètres), calculs de tuiles (Z/X/Y).tiling.py: Gestion du téléchargement et du cache des tuiles (images et élévation).
ui/: Interface utilisateur.launcher.py: Interface PyQt6 de démarrage.overlay.py: Affichage tête haute (HUD) dans Panda3D (coordonnées, FPS, état du chargement).
utils/: Utilitaires divers.config_manager.py: Chargement et sauvegarde deconfig.json.
Configuration (config.json)
Les paramètres persistants sont stockés à la racine dans config.json. Ce fichier est mis à jour automatiquement à la fermeture pour sauvegarder la dernière position et la taille de la fenêtre.
Exemple de contenu :
{
"lat": 48.8566,
"lon": 2.3522,
"alt": 500.0,
"map_type": "sat",
"show_edges": false
}Points d’Attention pour la Maintenance
- API Overpass :
- Les endpoints sont définis dans
src/engine/buildings.py(OVERPASS_ENDPOINTS). - En cas de blocage ou d’erreur 429 (Too Many Requests), le système effectue une rotation automatique des serveurs.
- Ajouter ou modifier ces URLs si les serveurs par défaut deviennent indisponibles.
- Les endpoints sont définis dans
- Gestion du Cache :
- Les tuiles téléchargées sont stockées dans le dossier
cache/. - Il n’y a pas de purge automatique du cache implémentée. Il peut être nécessaire de le vider manuellement si l’espace disque devient critique.
- Les tuiles téléchargées sont stockées dans le dossier
- Performance :
- Le paramètre
max_workersdansSceneManageretBuildingManagercontrôle le nombre de threads. À ajuster selon le CPU cible (actuellement réglé à 4). - Le système de « LOD » (Level of Detail) est basique (distance d’affichage).
- Le paramètre
5. Améliorations Possibles
Pour faire évoluer le projet, voici quelques pistes identifiées :
- Optimisation du Rendu (LOD) : Implémenter des niveaux de détails géométriques pour les bâtiments. Afficher des cubes simples au loin et des géométries complexes de près.
- Végétation et Biosphère : Exploiter les tags OSM
natural=tree,landuse=forestpour placer des modèles d’arbres génériques. - Ambiance Sonore : Ajouter un moteur audio (bruit du vent, trafic urbain) spatialisé selon l’altitude.
- Météo Dynamique : Intégrer un système de particules pour la pluie/neige et du brouillard volumétrique pour masquer le « clipping » à l’horizon.
- Mise en Cache Avancée : Implémenter une stratégie LRU (Least Recently Used) pour nettoyer automatiquement le dossier
cache/. - Interface In-Game : Ajouter une mini-carte (minimap) et un menu de configuration accessible sans redémarrer (touche Echap -> Menu).